Elasticsearch
1、调优手段
仅索引层面调优手段
-
设计阶段调优
- 根据业务增量需求,采取基于日期模板创建索引,通过 roll over API 滚动索引;
- 使用别名进行索引管理;
- 每天凌晨定时对索引做 force_merge 操作,以释放空间;
- 采取 curator 进行索引的生命周期管理;
- 仅针对需要分词的字段,合理的设置分词器;
- Mapping 阶段充分结合各个字段的属性,是否需要检索、是否需要存储等。
-
写入调优
- 写入前副本数设置为 0;
- 写入前关闭 refresh_interval 设置为 -1,禁用刷新机制;
- 写入过程中:采取 bulk 批量写入;
- 写入后恢复副本数和刷新间隔;
- 尽量使用自动生成的 id。
-
查询调优
- 禁用 wildcard;
- 禁用批量 terms(成百上千的场景);
- 充分利用倒排索引机制,能 keyword 类型尽量 keyword;
- 数据量大的时候,可以先基于时间敲定索引再检索;
- 设置合理的路由机制。
-
其它调优
2、ES 的倒排索引是什么
对基础概念的认知
传统的我们的检索是通过文章,逐个遍历找到对应关键词的位置。
而倒排索引是通过分词策略,形成了词和文章的映射关系表,这种词典 + 映射表即为倒排索引。
有了倒排索引,就能实现 O(1) 时间复杂度的效率检索文章,极大的提高检索效率。
倒排索引,相反于一篇文章包含了哪些词,它从词出发,记载了这个词在哪些文档中出现过,由两部分组成 -- 词典和倒排表。
倒排索引的底层实现是基于:FST(Finite State Transducer)数据结构。
Lucene 从 4+ 版本后开始大量使用的数据结构是 FST。FST 有两个优点:
- 空间占用小。通过对词典中单词前缀和后缀的重复利用,压缩了存储空间。
- 查询速度快。O(len(str)) 的查询时间复杂度。
3、ES 索引数据多了怎么办,如何调优、部署
索引数据的规划,应在前期做好,"设计先行,编码在后",这样才能有效的避免突如其来的数据激增导致集群处理能力不足引发的线上客户检索或者其他业务受到影响。
-
动态索引层面调优
- 基于模板 + 时间 + rollover api 滚动创建索引,举例:设计阶段定义:blog 索引的模板格式为:blog_index_时间戳的形式,每天递增数据。
- 这样做的好处:不至于数据量激增导致单个索引数据量非常大,接近于上限 2 的 32 次幂 - 1,索引存储达到了 TB+ 甚至更大。
- 一旦单个索引很大,存储等各种风险也随之而来,所以要提前考虑 + 及早避免。
-
存储层面
- 冷热数据分离存储,热数据(比如最近 3 天或者一周的数据),其余为冷数据。对于冷数据不会再写入新数据,可以考虑定期 force_merge 加 shrink 压缩操作,节省存储空间和检索效率。
-
部署层面
- 一旦之前没有规划,这里就属于应急策略。
- 结合 ES 自身的支持动态扩展的特点,动态新增机器的方式可以缓解集群压力。
- 注意:如果之前主节点等规划合理,不需要重启集群也能完成动态新增的。
4、ES 是如何实现 master 选举的
了解 ES 集群的底层原理。
前置前提:
- 只有候选主节点(master:true)的节点才能成为主节点。
- 最小主节点数(min_master_nodes)的目的是防止脑裂。
查看源码可知:核心入口为 findMaster,选择主节点成功返回对应 Master,否则返回 null。选举流程大致描述如下:
- 确认候选主节点数达标,elasticsearch.yml 设置的值:discovery.zen.minimum_master_nodes;
- 比较:先判定是否具备 master 资格,具备候选主节点资格的优先返回;若两节点都为候选主节点,则 id 小的值为主节点。注意这里的 id 为 string 类型。
5、描述 ES 索引文档的过程
了解 ES 的底层原理。
这里的索引文档应该理解为文档写入 ES,创建索引的过程。
文档写入包含:单文档写入和批量 bulk 写入。
单文档写入流程

- 客户从集群某节点写入数据,发送请求。(如果没有指定路由 / 协调节点,请求的节点扮演路由节点的角色。)
- 节点 1 接收到请求后,使用文档 id 来确定文档属于分片 0。请求会被转到另外的节点,假定节点3。因此分片 0 的主分片分配到节点 3 上。
注:借助路由算法获取,路由算法就是根据路由和文档 id 计算目标的分片 id 的过程:shard = hash(_routing) % (num_of_primary_shards)
- 节点 3 在主分片上执行写操作,如果成功,则将请求并行转发到节点 1 和节点 2 的副本分片上,等待结果返回。所有的副本分片都报告成功,节点 3 将向协调节点(节点 1)报告成功,节点 1 向请求客户端报告写入成功。
6、描述 ES 搜索的过程
搜索拆解为 “query then fetch” 两个阶段。
query阶段的目的:定位到位置,但不取。
步骤拆解如下:
- 假设一个索引数据有 5 主 + 1 副本共 10 分片,一次请求会名重(主或者副本分片中)的一个。
- 每个分片在本地进行查询,结果返回到本地有序的优先队列中。
- 第二步骤的结果发送到协调节点,协调节点产生一个全局的排序列表。
fetch 阶段的目的:取数据。
路由节点获取所有文档,返回给客户端。
7、ES 在部署时,对 Linux 的设置有哪些优化方法
了解 ES 集群的运维能力。
- 关闭缓存 swap;
- 堆内存设置为:Min(节点内存 / 2,32 GB);
- 设置最大文件句柄数。
- 线程池 + 队列大小根据业务需要做调整;
- 磁盘存储 raid 方式 -- 存储有条件使用 RAID10,增加单节点性能以及避免单节点存储故障。
8、lucene 内部结构是什么
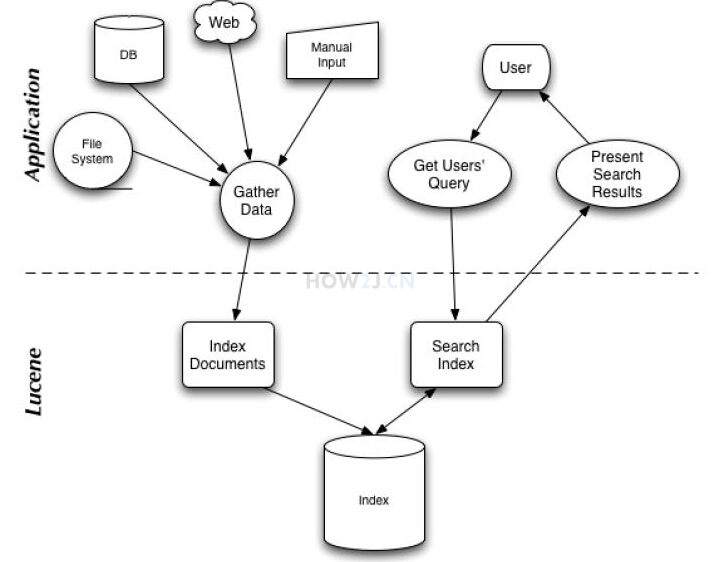
可以看出 Lucene 是有索引和搜索的两个过程,包含索引创建,索引,搜索三个要点。
下图是 Lucene 的各组件:

- 被索引的文档用 Document 对象表示;
- IndexWriter 通过函数 addDocument 将文档添加到索引中,实现创建索引的过程;
- Lucene 的索引是应用反向索引。
- 当用户有请求时,Query 代表用户的查询语句;
- IndexSearcher 通过函数 search 搜索 Lucene Index;
- IndexSearcher 计算 term weight 和 score 并且将结果返回给用户;
- 返回给用户的文档集合用 TopDocsCollector 表示。
索引的过程如下:
- 创建一个 IndexWriter 用来写索引文件,它有几个参数,INDEX_DIR 就是索引文件所存放的位置,Analyzer 便是用来对文档进行词法分析和语言处理的;
- 创建一个 Document 代表要索引的文档;
- 将不同的 Field 加入到文档中;
- IndexWriter 调用函数 addDocument 将索引写到索引文件夹中。
搜索过程如下:
- IndexReader 将磁盘上的索引信息读入到内存,INDEX_DIR 就是索引文件存放的位置;
- 创建 IndexSearcher 准备进行搜索;
- 创建 Analyer 用来对查询语句进行词法分析和语言处理;
- 创建 QueryParser 用来对查询语句进行语法分析;
- QueryParser 调用 parser 进行语法分析,形成查询语法树,放到 Query 中;
- IndexSearcher 调用 search 对查询语法树 Query 进行搜索,得到结果 TopScoreDocCollector。
9、ES 是如何实现 Master 选举的
- ES 的选举是 ZenDiscovery 模块负责的,主要包含 Ping(节点之间通过这个 RPC 来发现彼此)和 Unicast(单播模块包含一个主机列表以控制哪些节点需要 ping 通)这两部分;
- 对所有可以成为 master 的节点(node.master: true)根据 nodeId 字典排序,每次选举每个节点都把自己所知道节点排一次序,然后选出第一个(第 0 位)节点,暂且认为它是 master 节点。
- 如果对某个节点的投票数达到一定的值(可以成为 master 节点数 n / 2 + 1)并且该节点自己也选举自己,那这个节点就是 master。否则重新选举一直到满足上述条件。
- 补充:master 节点的职责主要包括集群、节点和索引的管理,不负责文档级别的管理;data 节点可以关闭 http 功能。
10、ES 中的节点(比如 20 个),其中的 10 个选了一个 master,另外 10 个选了另一个 master,怎么办
- 当集群 master 候选数量不小于 3 个时,可以通过设置最少投票通过数量(discovery.zen.minimum_master_nodes)超过所有候选节点一半以上来解决脑裂问题;
- 当候选数量为两个时,只能修改为唯一的一个 master 候选,其他作为 data 节点,避免脑裂问题;
11、客户端在和集群连接时,如何选择特定的节点执行请求
TransportClient 利用 transport 模块远程连接一个 ES 集群。它并不加入到集群中,只是简单的获得一个或者多个初始化的 transport 地址,并以轮询的方式与这些地址进行通信。
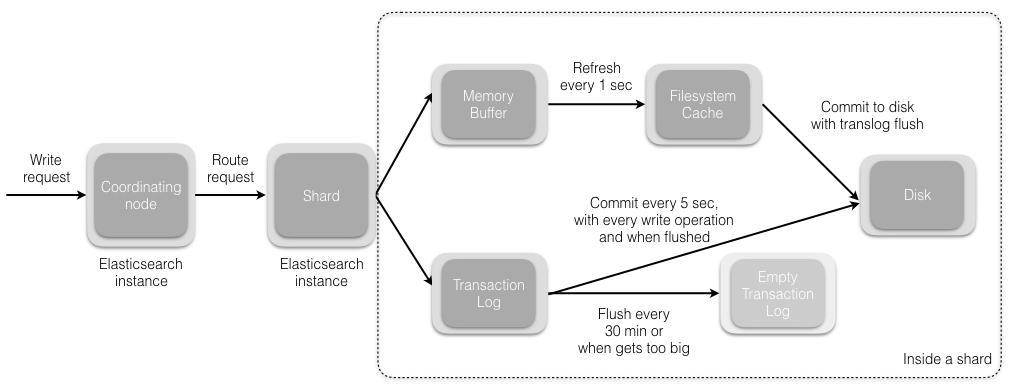
12、描述一下 ES 索引文档的过程
协调节点默认使用文档 ID 参与计算(也支持通过 routing),以便为路由提供合适的分片。
shard = hash(document_id) % (num_of_primary_shards)
- 当分片所在的节点接收到来自协调节点的请求后,会将请求写入到 Memory Buffer,然后定时(默认是每隔 1 秒)写入到 Filesystem Cache,这个从 Momery Buffer 到 Filesystem Cache 的过程就叫做 refresh;
- 在某些情况下,存在 Momery Buffer 和 Filesystem Cache 的数据可能会丢失,ES 是通过 translog 的机制来保证数据的可靠性的。其实现机制是接收到请求后,同时也会写入到 translog 中,当 Filesystem Cache 中的数据写入到磁盘中时,才会清除掉,这个过程叫做 flush;
- 在 flush 过程中,内存中的缓冲将被清除,内容被写入一个新段,段的 fsync 将创建一个新的提交点,并将内容刷新到磁盘,旧的 translog 将被删除并开始一个新的 translog;
- flush 触发的时机是定时触发(默认 30 分钟)或者 translog 变得太大(默认为 512M)时;
补充:关于 Lucene 的 Segement
- Lucene 索引是由多个段组成,段本身是一个功能齐全的倒排索引;
- 段是不可变的,允许 Lucene 将新的文档增量地添加到索引中,而不用从头重建索引;
- 对于每一个搜索请求而言,索引中的所有段都会被搜索,并且每个段会消耗 CPU 的时钟周、文件句柄和内存。这意味着段的数量越多,搜索性能会越低;
- 为了解决这个问题,ES 会合并小段到一个较大的段,提交新的合并段到磁盘,并删除那些旧的小段。
13、描述一下 ES 更新和删除文档的过程
- 删除和更新也都是写操作,但是 ES 中的文档是不可变的,因此不能被删除或者改动以展示其变更;
- 磁盘上的每个段都有一个相应的 .del 文件。当删除请求发送后,文档并没有真的被删除,而是在 .del 文件中被标记为删除。该文档依然能匹配查询,但是会在结果中被过滤掉。当段合并时,在 .del 文件中被标记为删除的文档将不会被写入新段;
- 在新的文档被创建时,ES 会为该文档指定一个版本号,当执行更新时,旧版本的文档在 .del 文件中被标记为删除,新版本的文档被索引到一个新段。旧版本的文档依然能匹配查询,但是会在结果中被过滤掉。
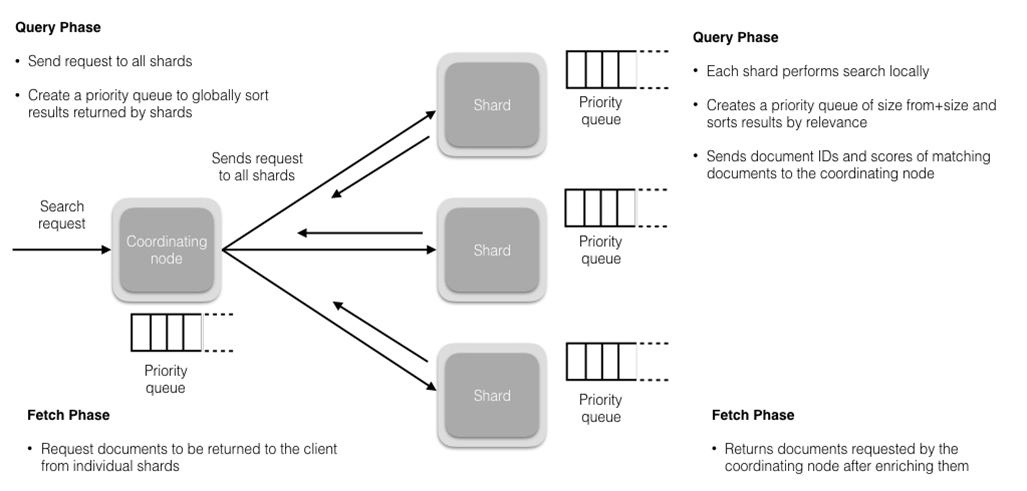
14、描述一下 ES 搜索的过程
- 搜索被执行成一个两阶段过程,称之为:Query Then Fetch;
- 在初始查询阶段时,查询会广播到索引中每一个分片拷贝(主分片或者副本分片)。每个分片在本地执行搜索并构建一个匹配文档的大小为 from + size 的优先队列;
注:在搜索的时候是会查询 Filesystem Cache 的,但是有部分数据还在 Memory Buffer,所以搜索是近实时的。
- 每个分片返回各自优先队列中所有文档的 ID 和排序值给协调节点,它合并这些值到自己的优先队列中来产生一个全局排序后的结果列表;
- 接下来就是取回阶段,协调节点辨别出哪些文档需要被取回并向相关的分片提交多个 GET 请求。每个分片加载并丰富文档,如果有需要的话,接着返回文档给协调节点。一旦所有的文档都被取回了,协调节点返回结果给客户端;
- 补充:Query Then Fetch 的搜索类型在文档相关性打分的时候参考的是本分片的数据,这样在文档数量较少的时候可能不够准确,DFS Query Then Fetch 增加了一个预查询的处理,询问 Term 和 Document Frequency,这个评分更准确,但是性能会变差。
15、在 ES 中,是怎么根据一个词找到对应的倒排索引的
Lucene 的索引文件格式(1)
Lucene 的索引文件格式(2)
16、ES 在部署时,对 Linux 的设置有哪些优化方法
- 64GB 内存的机器是非常理想的,但是 32GB 和 16GB 机器也是很常见的。少于 8GB 会适得其反;
- 如果要在更快的 CPUs 和更多的核心之间选择,选择更多的核心更好。多个内核提供的额外并发远胜过稍微快一点点的时钟频率;
- 如果负担得起 SSD,这是一个好的选择,它将远远超出任何旋转介质。基于 SSD 的节点,查询和索引性能都有提升;
- 即使数据中心们近在咫尺,也要避免集群跨越多个数据中心。绝对要避免集群跨越大的地理距离;
- 确保运行应用程序的 JVM 和服务器的 JVM 是完全一样的。在 ES 的几个地方,使用 Java 的本地序列化;
- 通过设置 gateway.recover_after_nodes、gateway.expected_nodes、gateway.recover_after_time 可以在集群重启的时候避免过多的分片交换,这可能会让数据恢复从数个小时缩短为几秒钟;
- ES 默认被配置为使用单播发现,以防止节点无意中加入集群。只有在同一台机器上运行的节点才会自动组成集群。最好使用单播代替组播;
- 不要随意修改垃圾回收器(CMS)和各个线程池的大小;
- 把内存的(少于)一半给 Lucene(但不要超过 32GB),通过 ES_HEAP_SIZE 环境变量设置;
- 内存交换到磁盘对服务器性能来说是致命的。如果内存交换到磁盘上,一个 100 微秒的操作可能变成 10 毫秒;
- Lucene 使用了大量的文件。同时,ES 在节点和 HTTP 客户端之间进行通信也使用了大量的套接字。所有这一切都需要足够的文件描述符。应该增加文件描述符,设置一个很大的值,如 64000。
补充:索引阶段性能提升方法
- 使用批量请求并调整其大小:每次批量数据 5 - 15MB 是个不错的起始点;
- 存储:使用 SSD;
- 段和合并:ES 默认值是 20MB / s,对机械磁盘应该是个不错的设置。如果用的是 SSD,可以考虑提高到 100 -200 MB / s。如果在做批量导入,完全不在意搜索,可以彻底关掉合并限流。另外还可以增加 index.translog.flush_threshold_size 设置,从默认的 512MB 到更大一些的值,比如 1GB,这可以在一次清空触发的时候在事务日志里积累出更大的段;
- 如果搜索结果不需要近实时的准确度,考虑把每个索引的 index.refresh_interval 改到 30s;
- 如果在做大批量导入,考虑通过设置 index.number_of_replicas: 0 关闭副本。
17、对于 GC 方面,在使用 ES 时需要注意什么
- SEE:https://elasticsearch.cn/article/32 ;
- 倒排词典的索引需要常驻内存,无法 GC,需要监控 data node 上 segment memory 增长趋势;
- 各类缓存,field cache, filter cache, indexing cache, bulk queue 等等,要设置合理的大小,并且要应该根据最坏的情况来看 heap 是否够用,也就是各类缓存全部占满的时候,是否还有 heap 空间可以分配给其他任务。避免采用 clear cache 等方式来释放内存;
- 避免返回大量结果集的搜索与聚合。确实需要大量拉取数据的场景,可以采用 scan & scroll api 来实现;
- cluster stats 驻留内存并无法水平扩展,超大规模集群可以考虑分拆成多个集群通过 tribe node 连接;
- 想知道 heap 够不够,必须结合实际应用场景,并对集群的 heap 使用情况做持续的监控。
18、ES 对于大数据量(上亿量级)的聚合如何实现
ES 提供的首个近似聚合是 cardinality 度量。它提供一个字段的基数,即该字段的 distinct 或者 unique 值的数目。它是基于 HLL 算法的。HLL 会先对我们的输入作哈希运算,然后根据哈希运算 的结果中的 bits 做概率估算从而得到基数。其特点是:可配置的精度,用来控制内存的使用(更精确 = 更多内存);小的数据集精度是非常高的;我们可以通过配置参数,来设置去重需要的固定内存使用量。无论数千还是数十亿的唯一值,内存使用量只与配置的精确度相关。
19、在并发情况下,ES 如何保证读写一致
- 可以通过版本号使用乐观并发控制,以确保新版本不会被旧版本覆盖,由应用层来处理具体的冲突;
- 另外对于写操作,一致性级别支持 quorum/one/all,默认为 quorum,即只有当大多数分片可用时才允许写操作。但即使大多数可用,也可能存在因为网络等原因导致写入副本失败,这样该副本被认为故障,分片将会在一个不同的节点上重建;
- 对于读操作,可以设置 replication 为 sync(默认),这使得操作在主分片和副本分片都完成后才会返回;如果设置 replication 为 async 时,也可以通过设置搜索请求参数 _preference 为 primary 来查询主分片,确保文档是最新版本。
20、如何监控 ES 集群状态
Marvel 可以很简单的通过 Kibana 监控 ES。可以实时查看集群健康状态和性能,也可以分析过去的集群、索引和节点指标。
21、介绍下电商搜索的整体技术架构

22、介绍下个性化搜索方案
基于 word2vec 和 Elasticsearch 实现个性化搜索
- 基于 word2vec、Elasticsearch 和自定义的脚本插件,就实现了一个个性化的搜索服务,相对于原有的实现,新版的点击率和转化率都有大幅的提升;
- 基于 word2vec 的商品向量还有一个可用之处,就是可以用来实现相似商品的推荐;
- 使用 word2vec 来实现个性化搜索或个性化推荐是有一定局限性的,因为它只能处理用户点击历史这样的时许数据,而无法全面的去考虑用户偏好,这个还是有很大的改进和提升的空间。
23、是否了解字典序
常用字典数据结构如下所示:
| 数据结构 | 优缺点 |
|---|
| 排序列表 Array / List | 使用二分法查找,不平衡 |
| HashMap / TreeMap | 性能高,内存消耗大,几乎是原始数据的三倍 |
| Skip List | 跳跃表,可快速查找词语,在 lucene、redis、Hbase 等均有实现。相对于 TreeMap 等结构,特别适合高并发场景 |
| Trie | 适合英文词典,如果系统中存在大量字符串且这些字符串基本没有公共前缀,则相应的 trie 树将非常消耗内存 |
| Double Array Trie | 适合做中文词典,内存占用小,很多分词工具均采用此种算法 |
| Ternary Search Tree | 三叉树,每一个 node 有 3 个节点,兼具省空间和查询快的优点 |
| Finite State Transducers(FST) | 一种有限状态转移机,Lucene 4 有开源实现,并大量使用 |
Trie 的核心思想是空间换时间,利用字符串的公共前缀来降低查询时间的开销以达到提高效率的目的。它有 3 个基本性质:
- 根节点不包含字符,除根节点外每一个节点都只包含一个字符;
- 从根节点到某一节点,路径上经过的字符连接起来,为该节点对应的字符串;
- 每个节点的所有子节点包含的字符都不相同。
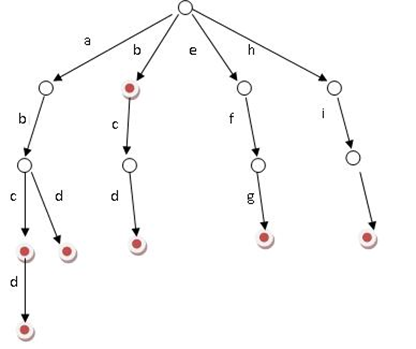
- 可以看到,trie 树每一层的节点数是 26^ 级别的。所以为了节省空间,我们还可以用动态链表,或者用数组来模拟动态。而空间的花费,不会超过单词数 $\times$ 单词长度;
- 实现:对每个结点开一个字母集大小的数组,每个结点挂一个链表,使用左儿子右兄弟表示法记录这棵树;
- 对于中文的字典树,每个节点的子节点用一个哈希表存储,这样就不用浪费太大的空间,而且查询速度上可以保留哈希的复杂度 O(1)。
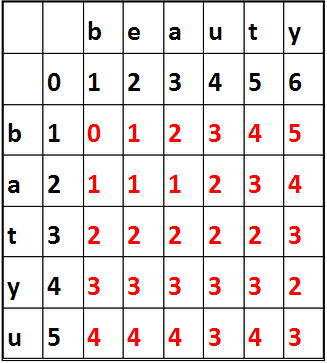
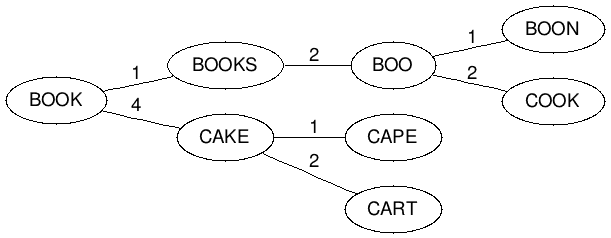
24、拼写纠错是如何实现的